
Основные модели и методы теории искусственных нейронных сетей.
Е.С.Борисов
среда, 19 октября 2005 г.
1 Введение
Математическая теория искусственных нейронных сетей многие идеи берёт из нейробиологической теории, согласно которой нервная система человека состоит из двух типов клеток -- нейронов и нейроглии.
Нейроглия (глиальные или шванновские клетки) окружает нервные клетки. В настоящее время глиальные клетки мало изучены. Считается, что они выполняет опорную, разграничительную и защитную функции. Глиальных клеток примерно в 10 раз больше чем нейронов. Они образуют т.н. миелиновую оболочку, которая снабжает аксон (отросток нейрона) метаболическими продуктами, компенсируя его удаленность от тела клетки.
Нейроны (нервные клетки) получают и передают электрохимические сигналы. Нейрон может обладать разными размерами и формой, но схематически его можно представить как шаровидное образование с отростками (рис.1).
![\includegraphics[height=3cm]{pict/bioneuron.ps}](content/neural-net-base.html/img2.png)
Составные части нейрона :
- Перикарион или сома - тело клетки, содержащее ядро.
- Дендриты - отростки, проводящие импульсы к телу нейрона. Они, как правило, короткие, широкие и сильно ветвятся.
- Аксон - отросток по которому нервный импульс распространяется от нейрона к другим клеткам. Аксон всегда один и может достигать длинны до 1м. На своем конце аксон может ветвится.
- Синапс - область где конечная ветка аксона контактирует с поверхностью сомы или дендрита другого нейрона. Различают возбуждающие синапсы, которые передают импульсы, активизирующей нейрон, и тормозящие синапсы, которые передают импульсы, тормозящие активность нейрона.
Возбуждение нейрона начинается в дендритах (или соме) и распространяется вдоль по аксону, вызывая в итоге возбуждение в других нейронах. Таким образом нейроны образуют сеть.
2 Искусственная нейронная сеть
Искусственная нейронная сеть это совокупность нейронных элементов и связей между ними [1].
![\includegraphics[width=10cm]{pict/Image39.ps}](content/neural-net-base.html/img3.png)
Основу каждой искусственной нейронной сети составляют относительно простые, в большинстве случаев - однотипные, элементы (ячейки), имитирующие работу нейронов мозга (рис.2), далее под нейроном мы будем подразумевать искусственный нейрон, ячейку искусственной нейронной сети.
- Нейрон обладает группой синапсов - однонаправленных входных
связей, соединенных с выходами других нейронов. Каждый синапс характеризуется
величиной синаптической связи или ее весом wi.
- Каждый нейрон имеет текущее состояние, которое обычно определяется, как
взвешенная сумма его входов:

- Нейрон имеет аксон - выходную связь данного нейрона,
с которой сигнал (возбуждения или торможения) поступает на
синапсы следующих нейронов. Выход нейрона есть функция его
состояния:
y = f(s)
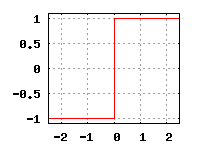
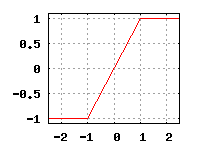
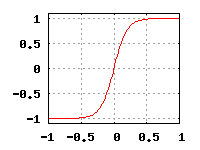
Функция f называется функцией активации. Примеры такой функции приведены на рис. 3.
|
Множество всех нейронов искусственной нейронной сети можно разделить на подмножества - т.н. слои. Взаимодействие нейронов происходит послойно.
Слой искусственной нейронной сети это множество нейронов на которые в каждый такт времени параллельно поступают сигналы от других нейронов данной сети [1].
Выбор архитектуры искусственной нейронной сети определяется задачей. Для некоторых классов задач уже существуют оптимальные конфигурации. Если же задача не может быть сведена ни к одному из известных классов, разработчику приходится решать задачу синтеза новой конфигурации. Проблема синтеза искусственной нейронной сети сильно зависит от задачи, дать общие подробные рекомендации затруднительно. В большинстве случаев оптимальный вариант искусственной нейронной сети получается опытным путем[2].
Искусственные нейронные сети могут быть программного и аппаратного исполнения. Реализация аппаратная обычно представляет собой параллельный вычислитель, состоящий из множества простых процессоров [3].
Важной особенностью искусственной нейронной сети есть возможность её обучения. Обычно процесс обучения сводится к корректировке весовых коэффициентов. Алгоритмы обучения искусственных нейронных сетей можно разделить на два класса:
- обучение с учителем - сети предъявляются значения как входных, так и желательных выходных сигналов, и система по определенному алгоритму подстраивает веса своих синаптических связей.
- обучение без учителя - веса изменяются по алгоритму, учитывающему только входные и производные от них сигналы.
3 Обучение с учителем
Технология обучения ''с учителем'' искусственной нейронной сети обычно предполагает наличие двух однотипных множеств:
- Множества учебных примеров, которое используется для ''настройки'' сети.
- Множества контрольных примеров, которое используется для оценки качества работы сети.
Элементами этих двух множеств есть пары ( X, YI ), где
- X - вход, для обучаемой нейронной сети;
- YI - идеальный (желаемый) выход сети для входа X;
Так же определяется функция ошибки E. Обычно это средняя квадратичная ошибка [3]:
где
- P - количество обработанных нейронной сетью примеров;
- yi - реальный выход нейронной сети;
- di - желаемый (идеальный) выход нейронной сети;
Процедура обучения искусственной нейронной сети сводится к процедуре коррекции весов её связей. Целью процедуры коррекции весов есть минимизация функции ошибки E.
Общая схема обучения "с учителем" выглядит так :
- Весовые коэффициенты нейронной сети устанавливаются некоторым образом, обычно - малыми случайными значениями.
- На вход нейронной сети в определенном порядке
подаются учебные примеры. Для каждого примера вычисляется ошибка
EL (ошибка обучения) и по определенному алгоритму
производится коррекция весов. Целью процедуры коррекции весов есть
минимизация ошибки EL.
- Проверка правильности работы сети -- на вход в определенном порядке
подаются контрольные примеры. Для каждого примера вычисляется
ошибка EG
(ошибка обобщения). Если результат неудовлетворительный то, производится
модификация множества учебных примеров или архитектуры сети и повторение
цикла обучения.
Если после нескольких итераций алгоритма обучения ошибка обучения EL падает почти до нуля, в то время как ошибка обобщения EG в начале спадает а затем начинает расти, то это признак эффекта переобучения. В этом случае обучение необходимо прекратить.
3.1 Метод Розенблатта
В случае однослойной сети желаемые выходные значения нейронов единственного слоя известны, и подстройка весов синаптических связей идет в направлении, минимизирующем ошибку на выходе сети.
По этому принципу построен алгоритм Розенблатта. Данный метод был предложен Ф.Розенблаттом в 1959 г. для искусственной нейронной сети, названной персептрон (perceptron)[4]. Персептрон имеет пороговую функцию активации, его схема представлена здесь. Правило обучения для персептрона выглядит так [1] :
- xi - i-тый вход искусственной нейронной сети
- dj - желаемый (идеальный) j-тый выход нейронной сети
- a - коэффициент (скорость обучения) 0 < a ≤ 1
Весовые коэффициенты меняются только в том случае, если реальное выходное значение не совпадает идеальным выходным значением.
3.2 Метод Видроу-Хоффа
Персептрон Розенблатта ограничивается бинарными выходами. Видроу и Хофф изменили модель Розенблатта. Их первая модель - ADALINE (Adaptive Linear Element) имела один выходной нейрон и непрерывную линейную функцию активации нейронов[6].

Метод обучения Видроу-Хоффа известен еще как дельта-правило (delta-rule). Этот метод ставит своей целью минимизацию функции ошибки E в пространстве весовых коэффициентов.
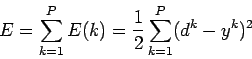
- P - количество обработанных и сетью примеров
- E(k) - ошибка для k-го примера
- yk - реальный выход сети для k-го примера
- dk - желаемый (идеальный) выход сети для k-го примера
Минимизация E осуществляется методом градиентного спуска
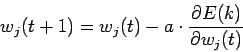
где

Таким образом весовые коэффициенты изменяются по правилу
|
3.3 Метод обратного распространения
Сеть, имеющую два и более слоёв, уже проблематично обучить описанными выше методами, поскольку в многослойных сетях известен выход лишь последнего слоя нейронов.
Решение этой задачи был предложено Д.Румельхартом с соавторами в 1986 году[5]. Предложенный метод обучения многослойной искусственной нейронной сети, был назван методом обратного распространения ошибки. Основная идея этого метода состояла в распространение сигналов ошибки от выходов сети к её входам, в направлении, обратном прямому распространению сигналов в обычном режиме работы.
Метод обратного распространения ошибки (error back propagation) это итеративный градиентный алгоритм обучения многослойной искусственной нейронной сети без обратных связей [5,3]. При обучении ставится задача минимизации функции ошибки:
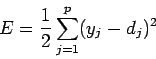
где
- yj - реальное значение j-того выхода сети;
- dj - идеальное (желаемое) значение j-того выхода сети;
Минимизация E ведется методом градиентного спуска. Подстройка весовых коэффициентов происходит следующим образом:

где
- wij - весовой коэффициент синаптической связи, соединяющей i-ый и j-ый узлы сети;
- 0 < h <1 - коэффициент скорости обучения;
- Второй множитель (6)
Здесь
- yj - выход нейрона номер j,
- sj - взвешенная сумма его входных сигналов, то есть аргумент активационной функции.
- Первый множитель в (7) раскладывается следующим образом:
где k число нейронов слоя n+1
- Второй множитель (7)
 есть производная активационной функции по ее аргументу. Из этого следует, что производная активационной функции должна быть определена на всей оси абсцисс. Таким образом - функция единичного скачка и прочие активационные функции с неоднородностями не подходят. В данном случае применяются гладкие функции - гиперболический тангенс или классический сигмоид с экспонентой.
есть производная активационной функции по ее аргументу. Из этого следует, что производная активационной функции должна быть определена на всей оси абсцисс. Таким образом - функция единичного скачка и прочие активационные функции с неоднородностями не подходят. В данном случае применяются гладкие функции - гиперболический тангенс или классический сигмоид с экспонентой.
- Третий множитель (7)
 ,
есть выход i-того нейрона предыдущего слоя.
,
есть выход i-того нейрона предыдущего слоя.
![\begin{displaymath}
\frac{\partial E}{\partial y_j}=
\sum\limits_k
\frac{\par...
...dot
\frac{\partial y_k}{\partial s_k}\cdot
w_{jk}^{[n+1]}
\end{displaymath}](content/neural-net-base.html/img43.png)
Введя новую переменную
![\begin{displaymath}
\delta_j^{[n]}=
\frac{\partial E}{\partial y_j}\cdot
\frac{\partial y_j}{\partial s_j}
\end{displaymath}](content/neural-net-base.html/img47.png)
мы получим рекурсивную формулу для расчетов величин
![]() слоя n из величин
слоя n из величин
![]() слоя n+1.
слоя n+1.
![\begin{displaymath}
\delta_j^{[n]}=
\frac{d y_j}{d s_j}\cdot
\sum\limits_k \delta_k^{[n+1]} w_{jk}^{[n+1]}
\end{displaymath}](content/neural-net-base.html/img51.png)
Для выходного слоя
Теперь мы можем записать (6) в раскрытом виде:
4 Обучение без учителя
Для методов обучения ''без учителя'', так же как и методов обучения ''с учителем'', требуется множество учебных примеров. Процесс обучения, как и в случае обучения ''с учителем'', сводится к подстраиванию весовых коэффициентов. Но в отличии от обучения ''с учителем'', здесь нет эталонных выходов и веса изменяются по алгоритму, учитывающему только входные и производные от них сигналы.
4.1 Метод Хебба
Метод Хебба основывается на биологическом феномене обучения путем повторения и привыкания. Этот феномен еще известен как эффект проторения[7].
При обучении искусственной нейронной сети сигнальным методом Хебба[8] усиливаются связи между возбужденными нейронами, в данном случае веса изменяются по следующему правилу:
где
- yi[n-1] выходное значение нейрона i слоя n-1;
- yj[n] выходное значение нейрона j слоя n;
- wij(t) и wij(t-1) весовой коэффициент синапса, соединяющего эти нейроны, на итерациях t и t-1 соответственно;
- a - коэффициент скорости обучения.
Существует также дифференциальный метод обучения Хебба.
Здесь
- yi[n-1](t) и yi[n-1](t-1) выходное значение нейрона i слоя n-1 соответственно на итерациях t и t-1;
- yj[n](t) и yj[n](t-1) то же самое для нейрона j слоя n.
Как видно из (14), сильнее всего обучаются синапсы, соединяющие те нейроны, выходы которых наиболее динамично изменились в сторону увеличения.
Литература
- 1
- В.А.Головко, под ред.проф.А.И.Галушкина Нейронные сети: обучение, организация и применение. - Москва : ИПРЖР, 2001
- 2
- С.Короткий Нейронные сети - http://lii.newmail.ru
- 3
- Л.Г.Комарцова, А.В. Максимов Нейрокомпьютеры. - Москва : МГТУ им. Н.Э.Баумана, 2002
- 4
- F.Rosenblatt Principles of Neurodinamics. - New York: Spartan Books,1962.
Русский перевод:
Ф.Розенблатт Принципы нейродинамики. - Москва : Мир, 1965. - 5
- D.E.Rumelhart, G.E.Hinton, R.J.Williams Learning internal representations by error propagation. // In Parallel distributed processing, vol. 1, pp. 318-62. Cambridg, MA: MIT Press, 1986.
- 6
- В.Widrow, M.Hoff Adaptive switching circuits. // IRE WESCON Convention Record, part 4, pp. 96-104. New York: Institute of Radio Engineers, 1960.
- 7
- Ю.И.Петунин Приложение теории случайных процессов в биологии и медицине. - Киев : Наукова Думка, 1981.
- 8
- D.O.Hebb Organization of behavior. - New York: Science Editions, 1949.
Evgeny S. Borisov
2005-10-19