
–Ю–±—А–∞–±–Њ—В–Ї–∞ –≤–Є–і–µ–Њ: –і–µ—В–µ–Ї—В–Њ—А –Њ–±—К–µ–Ї—В–Њ–≤ –љ–∞ –Њ—Б–љ–Њ–≤–µ —Ж–≤–µ—В–Њ–≤—Л—Е —Д–Є–ї—М—В—А–Њ–≤.
–Х–≤–≥–µ–љ–Є–є –С–Њ—А–Є—Б–Њ–≤
–њ—П—В–љ–Є—Ж–∞, 14 –љ–Њ—П–±—А—П 2014 –≥.
–Т —Н—В–Њ–є —Б—В–∞—В—М–µ –Љ—Л –њ–Њ–≥–Њ–≤–Њ—А–Є–Љ –Њ –Ј–∞–і–∞—З–∞—Е –≤–Є–і–µ–Њ–љ–∞–±–ї—О–і–µ–љ–Є—П, —В–Њ—З–љ–µ–µ вАУ –Њ –≤—Л—П–≤–ї–µ–љ–Є–Є –Є –Њ—В—Б–ї–µ–ґ–Є–≤–∞–љ–Є–Є –≤ –Ї–∞–і—А–µ –Њ–њ—А–µ–і–µ–ї—С–љ–љ–Њ–≥–Њ –Њ–±—К–µ–Ї—В–∞. –Т –Њ—Б–љ–Њ–≤–µ —Н—В–Њ–≥–Њ –Љ–µ—В–Њ–і–∞ –ї–µ–ґ–Є—В –Є–і–µ—П —Д–Є–ї—М—В—А–∞—Ж–Є–Є –Ї–∞—А—В–Є–љ–Ї–Є –њ–Њ —Ж–≤–µ—В—Г. –≠—В–Њ—В –Љ–µ—В–Њ–і –Љ–Њ–ґ–љ–Њ –њ—А–Є–Љ–µ–љ—П—В—М, –Ї–Њ–≥–і–∞ –Њ–±—К–µ–Ї—В —Б—Г—Й–µ—Б—В–≤–µ–љ–љ–Њ –Њ—В–ї–Є—З–∞–µ—В—Б—П –њ–Њ —Ж–≤–µ—В—Г –Њ—В —Д–Њ–љ–∞ –Є —Г—Б–ї–Њ–≤–Є—П –Њ—Б–≤–µ—Й–µ–љ–Є—П –Є–Ј–Љ–µ–љ—П—О—В—Б—П –Љ–∞–ї–Њ.
1 –Т–≤–µ–і–µ–љ–Є–µ
–Ш–і–µ—П –≤—Л–і–µ–ї—П—В—М –љ–∞ –Ї–∞—А—В–Є–љ–Ї–µ –Њ–і–Є–љ –Є–Ј —Ж–≤–µ—В–Њ–≤ –і–ї—П –љ–∞—Е–Њ–ґ–і–µ–љ–Є—П –Њ–±—К–µ–Ї—В–∞ –Љ–Њ–ґ–µ—В –њ–Њ–Ї–∞–Ј–∞—В—М—Б—П –њ—А–Њ—Б—В–Њ–є, –Њ–і–љ–∞–Ї–Њ —В—Г—В –Љ–Њ–≥—Г—В —Б–Ї—А—Л–≤–∞—В—М—Б—П —А—П–і –Ј–∞—В—А—Г–і–љ–µ–љ–Є–є, —Б–≤—П–Ј–∞–љ–љ—Л—Е —Б —В–µ—Е–љ–Є—З–µ—Б–Ї–Є–Љ–Є —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–∞–Љ–Є –Ї–∞–Љ–µ—А—Л –Є –љ–µ —В–Њ–ї—М–Ї–Њ. –Ф–ї—П —Н—Д—Д–µ–Ї—В–Є–≤–љ–Њ–є —А–µ–∞–ї–Є–Ј–∞—Ж–Є–Є —Н—В–Њ–є –Є–і–µ–Є –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –±—Г–і–µ—В –њ—А–Є–Љ–µ–љ–Є—В—М –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ —А–∞–Ј–ї–Є—З–љ—Л—Е –Љ–µ—В–Њ–і–Њ–≤ –і–ї—П –Њ–±—А–∞–±–Њ—В–Ї–Є –Є–Ј–Њ–±—А–∞–ґ–µ–љ–Є–є, –Њ–± —Н—В–Њ–Љ –Є –њ–Њ–є–і—С—В —А–µ—З—М –љ–Є–ґ–µ.
2 –Я–Њ—Б—В–∞–љ–Њ–≤–Ї–∞ –Ј–∞–і–∞—З–Є
–Э–µ—Д–Њ—А–Љ–∞–ї—М–љ–Њ –Ј–∞–і–∞—З—Г –Љ–Њ–ґ–љ–Њ —Б—Д–Њ—А–Љ—Г–ї–Є—А–Њ–≤–∞—В—М —Б–ї–µ–і—Г—О—Й–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ. –Я–Њ—Б—В—А–Њ–Є—В—М —Б–Є—Б—В–µ–Љ—Г –≤—Л—П–≤–ї–µ–љ–Є—П –Є –Њ—В—Б–ї–µ–ґ–Є–≤–∞–љ–Є—П –њ–Њ–ї–Њ–ґ–µ–љ–Є—П –Ј–∞–і–∞–љ–љ–Њ–≥–Њ –Њ–±—К–µ–Ї—В–∞ –≤ –Ї–∞–і—А–µ, –њ—А–Є —Б–ї–µ–і—Г—О—Й–Є—Е —Г—Б–ї–Њ–≤–Є—П—Е: –Њ–±—К–µ–Ї—В —Б—Г—Й–µ—Б—В–≤–µ–љ–љ–Њ –Њ—В–ї–Є—З–∞–µ—В—Б—П –њ–Њ —Ж–≤–µ—В—Г –Њ—В —Д–Њ–љ–∞, –Њ—Б–≤–µ—Й–µ–љ–Є–µ –Є–Ј–Љ–µ–љ—П—В—Б—П –Љ–∞–ї–Њ, –Ї–∞—А—В–Є–љ–Ї–∞ –Љ–Њ–ґ–µ—В —Б–Њ–і–µ—А–ґ–∞—В—М —И—Г–Љ.
3 –†–µ—И–µ–љ–Є–µ –Ј–∞–і–∞—З–Є
–¶–≤–µ—В –њ–Є–Ї—Б–µ–ї–µ–є –Ї–∞—А—В–Є–љ–Ї–Є –Ј–∞–≤–Є—Б–Є—В –Њ—В —Б–Њ—Б—В–Њ—П–љ–Є—П –Ї–∞–Љ–µ—А—Л –Є —Г—Б–ї–Њ–≤–Є–є –Њ—Б–≤–µ—Й–µ–љ–Є—П, –Ї–Њ—В–Њ—А–Њ–µ –Љ–Њ–ґ–µ—В –±—Л—В—М –љ–µ—А–∞–≤–љ–Њ–Љ–µ—А–љ—Л–Љ.
 –†–Є—Б.1: –Є—Б—Е–Њ–і–љ–∞—П –Ї–∞—А—В–Є–љ–Ї–∞ —Б —Б–Є–љ–Є–Љ –Љ–∞—А–Ї–µ—А–Њ–Љ |
 –†–Є—Б.2: –Є—Б—Е–Њ–і–љ–∞—П –Ї–∞—А—В–Є–љ–Ї–∞ —Б –Ї—А–∞—Б–љ—Л–Љ –Љ–∞—А–Ї–µ—А–Њ–Љ |
 –†–Є—Б.3: –≤—Л—А–∞–≤–љ–Є–≤–∞–љ–Є–µ –≥–Є—Б—В–Њ–≥—А–∞–Љ–Љ—Л (—Б–Є–љ–Є–є) |
 –†–Є—Б.4: –≤—Л—А–∞–≤–љ–Є–≤–∞–љ–Є–µ –≥–Є—Б—В–Њ–≥—А–∞–Љ–Љ—Л (–Ї—А–∞—Б–љ—Л–є) |
–†–µ–Ј—Г–ї—М—В–∞—В –≤—Л—А–∞–≤–љ–Є–≤–∞–љ–Є—П –≥–Є—Б—В–Њ–≥—А–∞–Љ–Љ—Л –Є–Љ–µ–µ—В –Љ–љ–Њ–≥–Њ –љ–µ–±–Њ–ї—М—И–Є—Е –њ–Њ —А–∞–Ј–Љ–µ—А—Г –Њ–±–ї–∞—Б—В–µ–є —А–µ–Ј–Ї–Њ–≥–Њ –Є–Ј–Љ–µ–љ–µ–љ–Є—П —П—А–Ї–Њ—Б—В–Є. –Ф–ї—П —Г—Б—В—А–∞–љ–µ–љ–Є—П —Н—В–Њ–≥–Њ –љ–µ–і–Њ—Б—В–∞—В–Ї–∞ –њ—А–Є–Љ–µ–љ–Є–Љ —Б–≥–ї–∞–ґ–Є–≤–∞–љ–Є–µ (—А–∞–Ј–Љ—Л–≤–∞–љ–Є–µ)[5].
 –†–Є—Б.5: —Б–≥–ї–∞–ґ–Є–≤–∞–љ–Є–µ (—Б–Є–љ–Є–є) |
 –†–Є—Б.6: —Б–≥–ї–∞–ґ–Є–≤–∞–љ–Є–µ (–Ї—А–∞—Б–љ—Л–є) |
–Я–Њ—Б–ї–µ —Н—В–Є—Е –њ—А–µ–Њ–±—А–∞–Ј–Њ–≤–∞–љ–Є–є –Љ–Њ–ґ–љ–Њ –њ—А–Є–Љ–µ–љ—П—В—М —Ж–≤–µ—В–Њ–≤—Г—О —Д–Є–ї—М—В—А–∞—Ж–Є—О, –µ—С –Љ—Л –±—Г–і–µ–Љ –≤—Л–њ–Њ–ї–љ—П—В—М –≤ —Ж–≤–µ—В–Њ–≤–Њ–Љ –њ—А–Њ—Б—В—А–∞–љ—Б—В–≤–µ HSV.
 –†–Є—Б.7: —Ж–≤–µ—В–Њ–≤–∞—П —Д–Є–ї—М—В—А–∞—Ж–Є—П (—Б–Є–љ–Є–є) |
 –†–Є—Б.8: —Ж–≤–µ—В–Њ–≤–∞—П —Д–Є–ї—М—В—А–∞—Ж–Є—П (–Ї—А–∞—Б–љ—Л–є) |
–Т —А–µ–Ј—Г–ї—М—В–∞—В–µ —Ж–≤–µ—В–Њ–≤–Њ–є —Д–Є–ї—М—В—А–∞—Ж–Є–Є –љ–∞ –Ї–∞—А—В–Є–љ–Ї–µ –Љ–Њ–≥—Г—В –Њ—Б—В–∞—В—М—Б—П —В–Њ—З–Ї–Є –љ–µ –њ—А–Є–љ–∞–і–ї–µ–ґ–∞—Й–Є–µ –Њ–±—К–µ–Ї—В—Г –љ–Њ
–±–ї–Є–Ј–Ї–Є–µ –µ–Љ—Г –њ–Њ —Ж–≤–µ—В—Г. –£—Б—В—А–∞–љ–Є—В—М –Є—Е –Љ–Њ–ґ–љ–Њ –Ї–Њ–љ–≤–µ—А—В–Є—А–Њ–≤–∞–≤ –Ї–∞—А—В–Є–љ–Ї—Г –≤ —З–µ—А–љ–Њ-–±–µ–ї—Г—О (–њ—А–Њ—Б—В—Л–Љ –њ–Њ—А–Њ–≥–Њ–≤—Л–Љ –њ—А–µ–Њ–±—А–∞–Ј–Њ–≤–∞–љ–Є–µ–Љ) –Є
–њ—А–Є–Љ–µ–љ–Є–≤ –Љ–µ—В–Њ–і—Л –Љ–∞—В–µ–Љ–∞—В–Є—З–µ—Б–Ї–Њ–є –Љ–Њ—А—Д–Њ–ї–Њ–≥–Є–Є [5].
 –†–Є—Б.9: –Њ–±–µ—Б—Ж–≤–µ—З–Є–≤–∞–љ–Є—П –њ–Њ –њ–Њ—А–Њ–≥—Г (—Б–Є–љ–Є–є) |
 –†–Є—Б.10: –Њ–±–µ—Б—Ж–≤–µ—З–Є–≤–∞–љ–Є—П –њ–Њ –њ–Њ—А–Њ–≥—Г (–Ї—А–∞—Б–љ—Л–є) |
 –†–Є—Б.11: –Њ—З–Є—Б—В–Ї–∞ –Љ–Њ—А—Д–Њ–ї–Њ–≥–Є–µ–є (—Б–Є–љ–Є–є) |
 –†–Є—Б.12: –Њ—З–Є—Б—В–Ї–∞ –Љ–Њ—А—Д–Њ–ї–Њ–≥–Є–µ–є (–Ї—А–∞—Б–љ—Л–є) |
–Ф–∞–ї–µ–µ –≤—Л–і–µ–ї—П–µ–Љ –Ї—А–∞—П [5] –Є –њ–Њ–ї—Г—З–∞–µ–Љ –Ї–Њ–љ—В—Г—А –Є—Б–Ї–Њ–Љ–Њ–≥–Њ –Њ–±—К–µ–Ї—В–∞.
 –†–Є—Б.13: –≤—Л–і–µ–ї–µ–љ–Є–µ –Ї—А–∞—С–≤ (—Б–Є–љ–Є–є) |
 –†–Є—Б.14: –≤—Л–і–µ–ї–µ–љ–Є–µ –Ї—А–∞—С–≤ (–Ї—А–∞—Б–љ—Л–є) |
4 –†–µ–∞–ї–Є–Ј–∞—Ж–Є—П
–Т —Н—В–Њ–Љ —А–∞–Ј–і–µ–ї–µ –Њ–њ–Є—Б–∞–љ–∞ —А–µ–∞–ї–Є–Ј–∞—Ж–Є—П —Б–Є—Б—В–µ–Љ—Л –Њ—В—Б–ї–µ–ґ–Є–≤–∞–љ–Є—П –Њ–±—К–µ–Ї—В–∞ —Б –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ –±–Є–±–ї–Є–Њ—В–µ–Ї–Є OpenCV [ 2] , –Ї–∞—А—В–Є–љ–Ї–∞ –њ–Њ—Б—В—Г–њ–∞–µ—В —Б –≤–µ–±–Ї–∞–Љ–µ—А—Л.
–Т –Ї–∞—З–µ—Б—В–≤–µ –Њ–±—К–µ–Ї—В–∞ –±—Г–і–µ–Љ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М –Њ–і–љ–Њ—В–Њ–љ–љ—Л–є —И–∞—А–Є–Ї. –Я—А–µ–ґ–і–µ —З–µ–Љ —Б–Є—Б—В–µ–Љ–∞ –љ–∞—З–љ—С—В —А–∞–±–Њ—В–∞—В—М
–љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –Њ–њ—А–µ–і–µ–ї–Є—В—М –њ–∞—А–∞–Љ–µ—В—А—Л —Ж–≤–µ—В–Њ–≤–Њ–≥–Њ —Д–Є–ї—М—В—А–∞. –≠—В–Њ –Љ–Њ–ґ–љ–Њ —Б–і–µ–ї–∞—В—М —Б –њ–Њ–Љ–Њ—Й—М—О —Б–њ–µ—Ж–Є–∞–ї—М–љ–Њ–є —Г—В–Є–ї–Є—В—Л (—Б—Б—Л–ї–Ї–∞ –љ–∞ –Є—Б—Е–Њ–і–љ–Є–Ї–Є –љ–Є–ґ–µ).
|
–†–Є—Б.15: –њ–Њ–і–±–Њ—А –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ —Д–Є–ї—М—В—А–∞ (—Б–Є–љ–Є–є) |
–†–Є—Б.16: –њ–Њ–і–±–Њ—А –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ —Д–Є–ї—М—В—А–∞ (–Ї—А–∞—Б–љ—Л–є) |
–Ф–∞–ї–µ–µ –Ј–∞–њ—Г—Б–Ї–∞–µ–Љ —Б–Є—Б—В–µ–Љ—Г —Б –њ–Њ–ї—Г—З–µ–љ–љ—Л–Љ–Є –њ–∞—А–∞–Љ–µ—В—А–∞–Љ–Є —Ж–≤–µ—В–Њ–≤–Њ–≥–Њ —Д–Є–ї—М—В—А–∞.
|
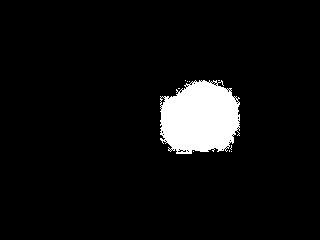
–†–Є—Б.17: —А–µ–Ј—Г–ї—М—В–∞—В —А–∞–±–Њ—В—Л –і–µ—В–µ–Ї—В–Њ—А–∞ (—Б–Є–љ–Є–є) |
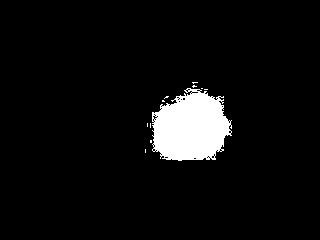
–†–Є—Б.18: —А–µ–Ј—Г–ї—М—В–∞—В —А–∞–±–Њ—В—Л –і–µ—В–µ–Ї—В–Њ—А–∞ (–Ї—А–∞—Б–љ—Л–є) |
–Ш—Б—Е–Њ–і–љ—Л–µ —В–µ–Ї—Б—В—Л –њ—А–Њ–≥—А–∞–Љ–Љ [ –Ј–і–µ—Б—М ].
–Ъ–∞—З–µ—Б—В–≤–Њ —А–∞–±–Њ—В—Л —Б–Є—Б—В–µ–Љ—Л –Ј–∞–≤–Є—Б–Є—В –Њ—В —Б—В–µ–њ–µ–љ–Є —Ж–≤–µ—В–Њ–≤–Њ–є —А–∞–Ј–љ–Є—Ж—Л –Љ–µ–ґ–і—Г —Д–Њ–љ–Њ–Љ –Є –Њ–±—К–µ–Ї—В–Њ–Љ. –†–µ–Ј—Г–ї—М—В–∞—В –Љ–Њ–ґ–љ–Њ —Г–ї—Г—З—И–Є—В—М —Г—Б–ї–Њ–ґ–љ–Є–≤ –Љ–Њ–і–µ–ї—М –Њ–±—К–µ–Ї—В–∞, –љ–∞–њ—А–Є–Љ–µ—А –љ–∞–±—А–∞—В—М —Б—В–∞—В–Є—Б—В–Ї—Г –Ї–∞—А—В–Є–љ–Њ–Ї —Б –Њ–±—К–µ–Ї—В–Њ–Љ –Є –Њ–њ–Є—Б–∞—В—М —Ж–≤–µ—В —В–Њ—З–µ–Ї –Њ–±—К–µ–Ї—В–∞ —Б –њ–Њ–Љ–Њ—Й—М—О —Б–Љ–µ—Б–Є –љ–Њ—А–Љ–∞–ї—М–љ—Л—Е —А–∞—Б–њ—А–µ–і–µ–ї–µ–љ–Є–є [3], –њ–Њ—Б–ї–µ —Н—В–Њ–≥–Њ –і–ї—П –Ї–∞–ґ–і–Њ–є —В–Њ—З–Ї–Є –Ї–∞—А—В–Є–љ–Ї–Є –≤—Л—З–Є—Б–ї—П—В—М –≤–µ—А–Њ—П—В–љ–Њ—Б—В—М –µ—С –њ—А–Є–љ–∞–і–ї–µ–ґ–љ–Њ—Б—В–Є –Њ–±—К–µ–Ї—В—Г[4].
–°–њ–Є—Б–Њ–Ї –ї–Є—В–µ—А–∞—В—Г—А—Л
[1] –Р–љ—В–Њ–љ –Ъ–Њ–љ—Г—И–Є–љ –Т–≤–µ–і–µ–љ–Є–µ –≤ –Ї–Њ–Љ–њ—М—О—В–µ—А–љ–Њ–µ –Ј—А–µ–љ–Є–µ: –Њ—Б–љ–Њ–≤—Л –≤–Є–і–µ–Њ–љ–∞–±–ї—О–і–µ–љ–Є—П вАУ http://www.lektorium.tv/course/22847
[2] OpenCV вАУ http://opencv.org
[3] –Х–≤–≥–µ–љ–Є–є –С–Њ—А–Є—Б–Њ–≤ –Т–Њ—Б—Б—В–∞–љ–Њ–≤–ї–µ–љ–Є–µ —Б–Љ–µ—Б–Є –њ–ї–Њ—В–љ–Њ—Б—В–µ–є —А–∞—Б–њ—А–µ–і–µ–ї–µ–љ–Є–є —Б –њ–Њ–Љ–Њ—Й—М—О EM-–∞–ї–≥–Њ—А–Є—В–Љ–∞ вАУ http://mechanoid.kiev.ua/ml-em-base.html
[4] –Х–≤–≥–µ–љ–Є–є –С–Њ—А–Є—Б–Њ–≤ –Ъ–ї–∞—Б—Б–Є—Д–Є–Ї–∞—В–Њ—А –љ–∞ –Њ—Б–љ–Њ–≤–µ RBF вАУ http://mechanoid.kiev.ua/ml-rbf.html
[5] –Х–≤–≥–µ–љ–Є–є –С–Њ—А–Є—Б–Њ–≤ –С–∞–Ј–Њ–≤—Л–µ –Љ–µ—В–Њ–і—Л –Њ–±—А–∞–±–Њ—В–Ї–Є –Є–Ј–Њ–±—А–∞–ґ–µ–љ–Є–є. -- http://mechanoid.home.lan/cv-base.html
