
Детектор объектов для неподвижных камер.
Евгений Борисов
пятница, 22 мая 2015 г.
В этой статье мы поговорим о задачах видеонаблюдения, точнее – о статистическом методе выявления в кадре новых объектов. В основе этого метода лежит идея вычитания фона из текущей картинки, его (метод) можно применять в случаях когда фон мало изменяется (неподвижная камера).
1 Введение
Идея вычитать фон из текущей картинки может показаться простой, однако с её реализациями могут быть связаны некоторые трудности. В ”чистом” виде этот подход можно применить только для специальных случаев, когда освещение не меняется, картинка содержит минимум шума и у нас есть возможность получить изображение фона без объектов, для последующей работы с ним. В реальности выше перечисленные условия редко выполняются и нужно как-то с этим бороться.
2 Постановка задачи
Неформально задачу можно сформулировать следующим образом. Построить систему выявления новых объектов в кадре, при следующих условиях: камера неподвижна, освещение может изменятся, картинка содержит шум.
3 Решение задачи
В общем случае решение задачи выглядит следующим образом.
- инициализация: загрузить картинку-фон B
- получить кадр C
- найти отличия кадра и фона D = B − C
- если ( D ( i ) > T ) то отметить точку C ( i )
- показать обработанный кадр C , переход на п.2
Для реализации этой схемы необходимо ответить на два вопроса.
- где взять картинку-фон B ?
- каким образом вычислять отличия фона B и текущего кадра C ?
3.1 Усреднённый фон
Для начала реализуем самый простой вариант - усреднённый фон. Соберём историю из n кадров, вычислим среднее значение и будем использовать этот результат как фон.
Отличия фона и текущего кадра будем вычислять как абсолютное значение разницы яркостей точек.

Это решение работает достаточно хорошо только в условиях стабильного освещёния и отсутствия шума.
На иллюстрациях ниже представлены результаты работы реализации метода, зелёным помечаются выделенные точки переднего плана.



3.2 Модель фона по Гауссу
Если нет возможности обеспечить ”хорошие” условия, то необходимо строить более сложную, чем в предыдущем случае, модель фона.
Далее мы рассмотрим статистические модели фона. В основе данного подхода лежит гипотеза о том, что состояние точек фона колеблется с некоторым небольшим отклонением от определённого среднего значения, если это отклонение больше порога то эта область на картинке содержит новый объект (передний план).
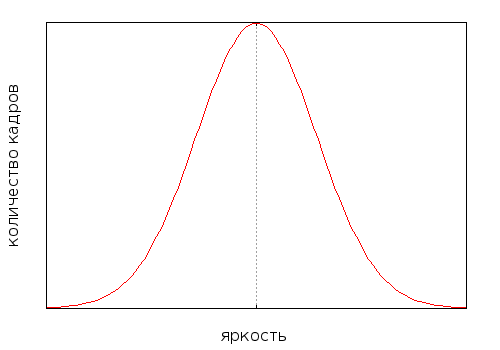
Рис.1: изменение яркости для точки фона
Для простоты будем рассматривать картинку в градациях серого. Рассмотрим точку в кадре.
Пусть
X={x1,...,xn}
последовательность состояний (яркость) выбранной точки в последовательности кадров длинны
n
.
Построим модель фона, опишем изменение состояния точки нормальным распределением.
Математическое ожидание состояния и дисперсия (мера отклонения) для выбранной точки описываются следующим образом.

Плотность распределения:

Таким образом фон задаётся нормальными распределениями на основе истории изменения кадров. Разница фона и текущего кадра определяется как вероятность принадлежности точки кадра к фону.



3.3 Модель фона для цветного изображения
До сих пор мы рассматривали одноканальные (grayscale) изображения, для цветных (трёхканальных) изображений, фон моделируется многомерным нормальным распределением.

3.4 Смесь гауссиан в качестве модели фона
Для улучшения результата можно воспользоваться смесью гауссиан в качестве модели фона.
Такая модель позволяет формировать несколько кластеров для значений яркости.
На иллюстрациях ниже представлены результаты работы реализации метода, зелёным помечаются выделенные точки переднего плана.


Список литературы
[1] Борисов Е. Базовые методы обработки изображений. – http://mechanoid.kiev.ua/cv-base.html
[2] Конушин А. Введение в компьютерное зрение: основы видеонаблюдения. -– http://www.lektorium.tv/course/22847
[3] OpenCV – http://opencv.org
[4] Борисов Е. Восстановление смеси плотностей распределений с помощью EM-алгоритма. – http://mechanoid.kiev.ua/ml-em-base.html
[5] P. KadewTraKuPong and R. Bowden, An improved adaptive background mixture model for real-time tracking with shadow detection, Proc. 2nd European Workshop on Advanced Video-Based Surveillance Systems, 2001 – http://personal.ee.surrey.ac.uk/Personal/R.Bowden/publications/avbs01/avbs01.pdf
